






































在制造业加速迈向数字智能化与柔性化的进程中,“具身智能化”成为工业移动机器人行业发展的下半场入场券。传统人工搬运和自动化设备,在多场景、多品种、高频次生产模式下,存在自主决策性不高、感知环境适应性不足、运行稳定性不高、调度智能化水平不高等痛点。而具备环境感知、智能决策与自主执行能力的室外智能AGV,可以重塑工业场景物流组织方式,是行业发展的必由之路。
技术创新——AI与感知的深度融合
我司新一代室外AGV自动驾驶技术研发以数据交互式AI大脑模型训练平台为核心,构造“模型-集群-端体”的智能机器人决策中央控制系统。即模型数据整合,集群细分协作、端体数据交互,模型快速训练迭代,端体智能环境自适应。
端体AI智能化以多传感器融合与超体环境建模为基础,融合激光雷达、视觉、IMU多源信息流,收集环境感知数据后实时回传自动驾驶数据模型综合训练平台,结合AI数据进行深层次环境语义理解并下发动态优化指令,端体车辆系统可以在雨雾、强光等户外环境多变量下保持连续可用的位置移动与高环境感知性。结合路径规划算法的探测感知数据融合,实时优化通行策略,减少无效路径与空载行程。
在某新能源制造工厂项目中,应用该自动驾驶智能机器人控制平台后,实现了快速稳定部署控制40多辆联网车体的自动驾驶功能,结合车端多传感器增强感知能力,在连续降雨和大面积户外区域保持±10 mm级稳定的定位精度装卸运行。
在物料识别与装载作业场景中,错误识别与识别效率偏低一直是行业难以解决的问题,研发团队运用AI训练视觉识别定位技术,成功扩展到室外随机场景下AGV适配效率与范围。基于大数据深度学习模块的目标识别算法,AGV车体可自动判定不同规格托盘与载具特征,动态生成叉取参数,提升运行效率与准确率。在某3C工厂应用中,该解决方案解决了小批量、多规格物料频繁切换问题,使物料周转效率提升约50%,设备等待时间缩短超60%。

模式重塑——自主化智能化调度体系构建
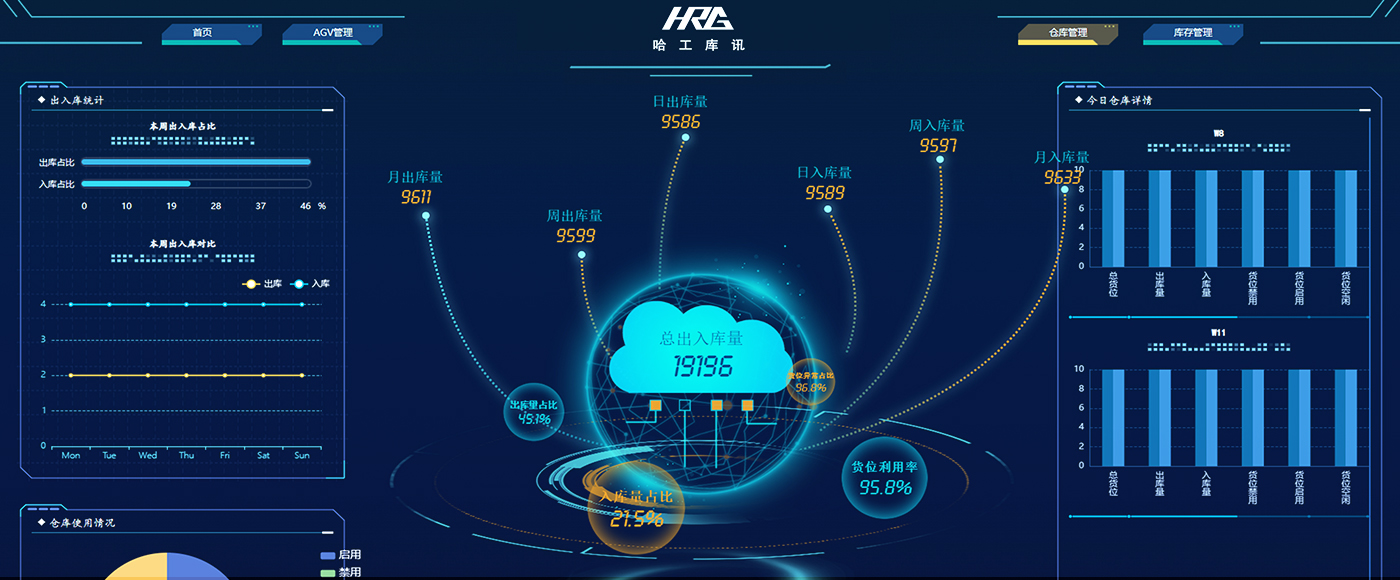
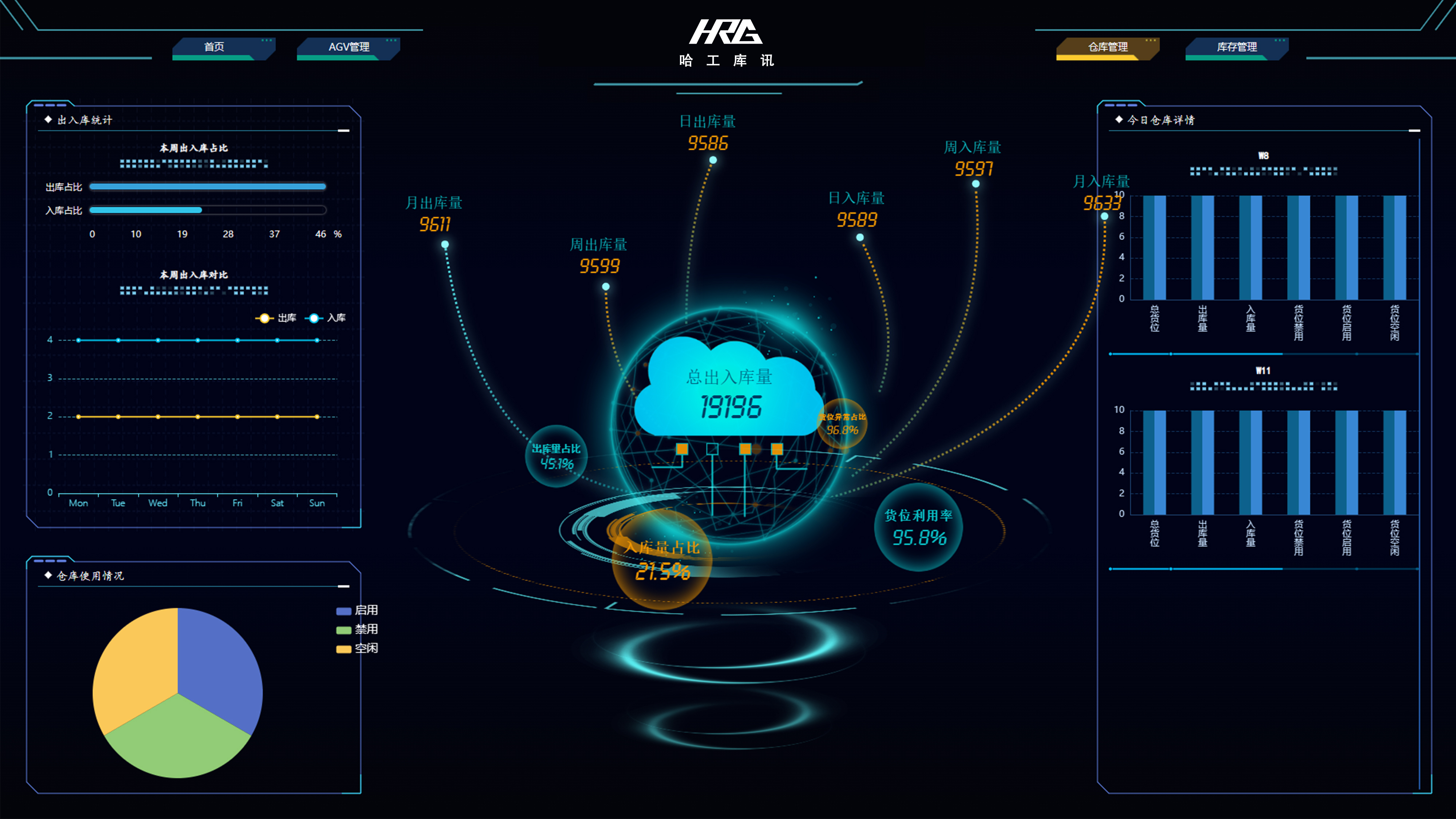
公司智能机器人终端调度系统模块承载着室外AGV的任务收发与端体设备实时监控功能。调度系统实时采集订单需求、设备状态、任务优先级、任务下发和环境感知数据,借助预测性算法动态排程,构建一套“自感知、自决策、自优化”的智能化闭环算法,让联网端体能够聪明有效的执行任务、反馈数据。
在设备出现故障或端体任务冲突时,端体车辆负载数据模型能够实现分钟级重新分配车体端联网设备任务,确保物流任务执行稳定。
在某汽车零部件工厂,引入自主化调度系统后,设备利用率从65%提升至92%;某家电企业订单交付准时率从75%提升至92%。随着交付项目数据的的积累和模型训练优化,该智能机器人调度系统自身处于持续升级迭代状态,实现“越用越好用、越好用越想用”的技术目标。

技术落地——创造真实价值
从行业落地实践来看,室外复杂场景下AGV的核心价值聚焦于“降本、智能、提质”的多维度收益。智能化升级是当下工业移动机器人行业向“具身智能”方向发展的必然选择。
通过对机器人智能化的定义理解与实现路径的革新,自动驾驶平台的云端中央数据控制系统应当发挥核心作用,端体车辆的数据用于模型训练和迭代,端体机器人既是任务的执行者,也是数据收集传递的载体,用数据驱动机器人实现任务的智能化理解、感知、规划和控制。
理念的革新意味着对场景空间重构与路径优化,伴随定位、感知算法、调度体系及车路协同技术的持续迭代,室外复杂场景下AGV逐步从 “单设备自动化” 迈向 “端体智能化”,成为高柔性智能工厂物流流动的新型选择。

哈工库讯自2024年伊始即紧跟行业智能化发展前沿,探索室外AGV具身智能核心技术研发,强化数据模型、算法与调度体系创新,推动车路协同技术体系化发展,已经取得了可喜的成绩。展望2025年,我们仍将聚焦具身智能移动机器人各项关键技术研究,加大资金投入力度,为更多的客户提供更智能的机器人解决方案,迎接万物互联的智能机器人时代。
END













